| |
|---|---|
| (点击题目可以在互联网中搜索该题目的相关内容) 日期:2006-3-26 19:51:14 来源: 作者: 点击: | |
|
摘要: 本项目采用OMRON公司新型PLC及伺服控制系统,对2台自动化搬运设备进行定位控制,提高了设备的控制精度同时又降低了设备的投资成本,方便了工序的操作。 关键词:可编程控制器 定位模块 伺服放大器 引言:随着伺服控制技术的发展,对于过去由液压马达或者变频器进行定位的设备,逐步被控制精度更高的伺服控制系统所取代,不仅仅是因为技术先进,更因为交流伺服控制系统故障率低,操作简单,控制定位精度高等优点极大的提升工厂技术装备的水平,为工厂的质量控制及效益的最大化创造了有力的条件。随着工业技术水平的不断提高,伺服控制也将成为传动和控制的主要方向之一。  1、 系统原理图 搬运系统在很多的行业有着广泛的应用,我们的生产线对搬运中的要求是定位准确精而且运动频繁故障率低,所以我们选择伺服系统作为控制部件。本系统采用OMRON公司的中型PLC CS1G系列和W系列伺服系统对3台交流伺服电机进行控制,其中2台伺服电机控制水平搬运,1台伺服电机对产品进行翻转。 以下是PLC系统配置示意图: 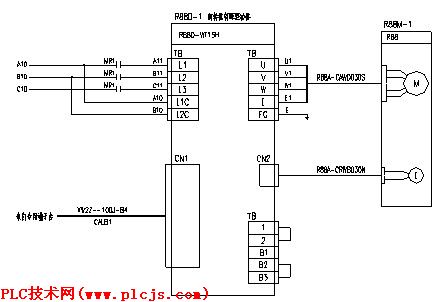 ●伺服放大器接线示意图: 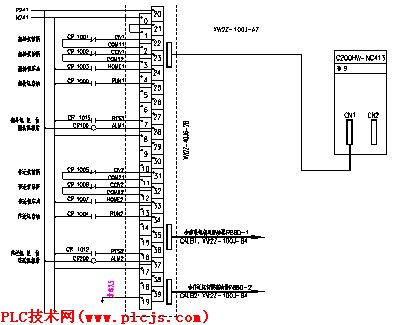 ●伺服中继单元及定位模块配置图: 2、硬件配置: 2.1 CPU机架: CPU单元选用目前欧姆龙最新型的中型PLC该PLC的优点在于处理速度快通讯能力强等优点,配置如下:CS1G-CPU42H,底板CS1W-BC103,电源单元C200HW-PA204,编程电缆XW2Z-500S-V、输入单元C200H-ID216、输出单元C200H-OD218;以及NT31C系列的人机界面。 定位模块C200HW-NC413,集电极开路输出,4轴定位控制,高速启动性能,可以使用WINDOWS专用NC支持工具(CX-POSITION),在记忆运转时可以控制100点每轴。 2.2 伺服放大器 ●伺服放大器选用R88D-WT50H(5KW)、R88D-WT15H(1。5KW),再生制动电阻R88A-RR22047S。伺服放大器的选择主要是依据系统的负载转距、速度等。对于转动惯量较大的负载,要求安装外接的再生制动电阻,按照发热功率进行选择。 ●伺服放大器参数设定: Pn000:功能选择基本开关设定,电机旋转方向、控制模式 0010 Pn001:功能选择应用开关设定1,电机发生报警时的停机方式 1000 Pn002:应用编码器设定,绝对值编码器、相对值编码器 0100 Pn100:速度闭环增益,调整伺服系统的刚性 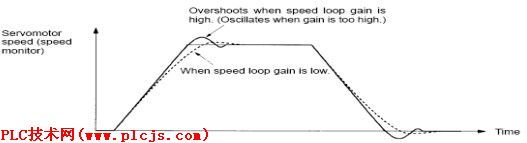 Pn101:速度环时间积分常数 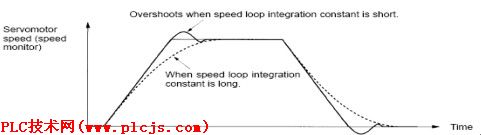 Pn102:位置环增益,调整系统的相应性满足机械刚性 Pn103:惯性比率,设定机械系统的惯性和电机惯性的比率 Pn200:定位控制参数设定 Pn201:编码器分辨率设定 Pn202:电子齿轮设定,分子 Pn203:电子齿轮设定,分母 Pn600:再生制动电阻能力 对于定位控制系统,以上参数必须进行设定及调整,保证设备机械系统的稳定运行,其它参数可以选择默认参数。 3、 软件编制 ●定位模块C200HW-NC413的参数可以通过编程软件进行设定,也可以通过程序进行传送,本项目采用程序传送,目的是为了保证在模块出现故障时,一般的电气维修人员即可以对模块进行更换,不需要技术人员对参数进行重新设定,以下是X轴参数进行程序设定的样例,Y轴、Z轴、U轴可以参照编写,对不使用的轴参数要进行相应的修改,否则会出现错误报警。 LD P_First_Cycle 本新闻共2页,当前在第1页1 2
|
|
| 上一篇: 邮政枢纽转运、包裹推挂控制系统 下一篇: 西门于MM440变频器在高炉送料系统的应用 |