| |
|---|---|
| (点击题目可以 在互联 网中搜索该题 目的相关内容) 日期:2007-8-23 23:45:12 来源:中国自动化网 作者: 点击: | |
|
1 引言 传统的鼠笼式异步电动机起、制动控制方式一般有四种,即定子回路串电阻起动,Y/△起动,自耦变压器起动和延边三角形起动;制动方式有三种,反接制动,能耗制动和电容制动,其中任何一种起,、制动控制方式的实现通常由继电器-接触器控制系统来完成。下面就以定子回路串电阻降压起动和反接制动为例,分析由继电器-接触器实现的鼠笼式异步电动机的起、制动控制。 如图1所示,此控制电路含三个接触器和一个中间继电器线圈,12个触点。起动时,KM2、KM3线圈均处于断开状态,按下起动按钮SB1,KM1线圈通电并自锁,电动机串电阻减压起动。当电动机转速上升到某一定值时(此值为速度继电器KS1的整定值,可调节,如调至100r/min时动作),速度继电器KS1的常开触点闭和,中间继电器KA通电并自锁,KA的常开触点接通接触器线圈KM3,KM3的主触点在主电路中短接定子电阻R,电动机转速上升至给定值时投入稳定运行。 制动时,按下停机按钮SB2,KM1线圈断电,其主触点断开三相电源;控制电路中常开触点断开,KM3失电,限流电阻串入;常闭触点闭合,接通反接制动接触器KM2,对调两相电源相序,电动机处于反接制动状态。当转速下降至某一定值时(比如100r/min),KS1常开触点断开KA,继而断开KM2,电动机失电,迅速停机。 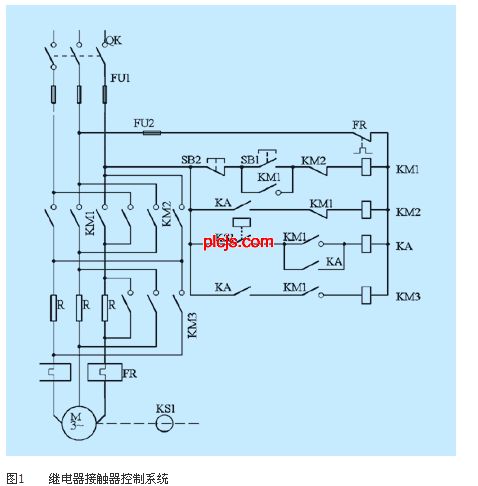 这种传统的继电器接触器控制方式控制逻辑清晰,采用机电合一的组合方式便于普通机类或电类技术人员维修,但由于使用的电气元件体积大、触点多、故障率大,因此,运行的可靠性较低。随着PLC技术的发展,使用PLC进行电机的运行控制已成为必然趋势。 2 采用PLC实现鼠笼式异步电动器起、制动控制 可编程序控制器是在继电器控制和计算机控制的基础上开发的产品,自60年代末,美国首先研制和使用可编程控制器以后,世界各国特别是日本和联邦德国也相继开发了各自的PLC(programmable logic controller),因此,与传统的继电器接触器控制系统相比较,笔者认为采用PLC实现鼠笼式异步电动机起制动控制是最明智的选择。下面就是笔者设计的采用PLC实现的鼠笼式异步电动机起制动控制电路的接线图、梯形图和指令程序,如图2和图3所示。 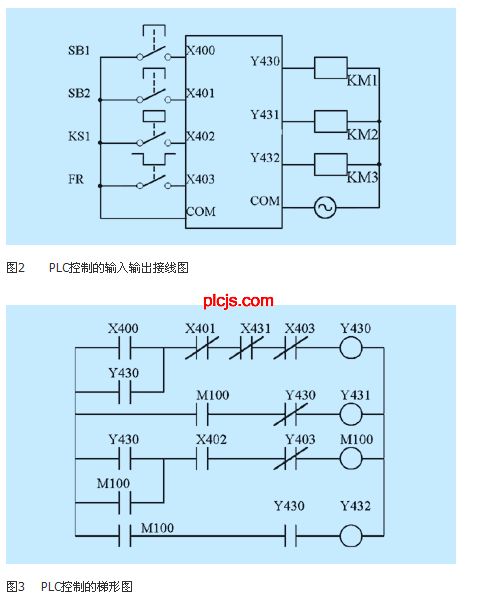 PLC控制逻辑与传统的继电器接触器控制系统基本一致,其工作过程如下: 起动时,按下起动按钮SB1,X400常开触点闭合,Y430线圈接通并自锁,KM1线圈接通,主触头吸合,电动机串入限流电阻R开始起动,同时Y430的两对常开触点闭合,当电动机转速上升到某一定值时,KS1的常开触点闭合,X402常开触点闭合,M100线圈接通并自锁,M100的一对常开触点接通Y432的线圈,KM3线圈有电主触头吸合,短接起动电阻,电机转速上升至给定值时投入稳定运行。 制动时,按下停机按钮SB2,X401常开触点断开Y430线圈,使KM1失电释放,而Y430的常闭触点接通Y431线圈,制动用的接触器KM2线圈通电,对调两相电源的相序,电动机处于反接制动状态。与此同时,Y430的常开触点断开Y432的线圈,KM3失电释放,串入电阻R限制制动电流。当电动机转速迅速下降至某一定值时,KS1常开触点断开,X402常开触点断开M100的线圈,M100的常开触点断开Y431线圈,KM2失电释放,电动机很快停下来。过载时,热继电器FR常开触点闭合,X403的两对常闭触点断开Y430和M110的线圈,从而使KM1或KM2失电释放,起到过载保护作用。 上述控制过程指令程序如下: 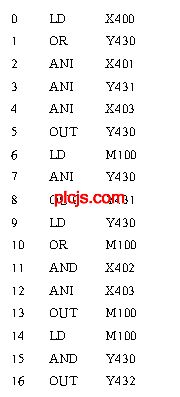 3 PLC与继电器接触器控制系统的比较 通过对鼠笼式异步电动机起制动的传统控制方法和PLC控制方法的比较,从某种意义上看,PLC控制是从继电器接触器控制发展而来的。两者既有相似性又有很多不同处。 3.1 二种方案的不同点 (1)PLC内部大部分采用“软”逻辑 本新闻共2页,当前在第1页1 2
|
|
| 上一篇: 三菱PLC与电脑串口联接线的自制 下一篇: 三菱FX系列PLC根据指示灯判断故障 |