点击【
大 中
小 】,可以选择字体的大小,以便你阅读.
1 引言
在实际应用中锅炉是一个复杂的系统,存在着惯性大、非线性、参数时变、数学模型难以建立等特点,必须采用合适的控制策略才能取得良好的控制效果。PID控制算法具有原理简单,调节精确的优点,但快速性不理想;Fuzzy控制算法具有无需建立被控对象的数学模型,对非线性、时变性系统具有一定的适应能力及快速性好的优点,但准确性不令人满意。本设计针对锅炉温度控制的特点与难点,将Fuzzy控制与PID控制算法相结合,构建了Fuzzy-PID复合控制策略,并在我校研制的基于现场总线的过程控制系统(涵盖了温度、压力、流量、液位四大过程参数)中进行了实践研究,结果表明,将Fuzzy控制与PID控制有效结合,是解决温度控制系统性能的一种有效途径。
2 系统组成原理
锅炉温度系统由上位机、下位机和被控对象等组成,如图1所示。上位机装有WINCC监控软件、Step7软件,完成系统的监控和控制程序设计。 下位机选用西门子S7-300PLC作为系统的控制器,由PS307电源模块,CPU315-2DP现场总线模块,SM323开关量8入/8出模块,SM331模拟量8路输入模块,SM332模拟量4路输出模块等组成,完成系统的启动、停止、保护,Fuzzy控制算法,PID控制算法等控制功能。被控对象由带内胆、外胆的锅炉,晶闸管调功器,水系统,加热器,pt100温度检测变送器等组成,完成接收控制信号、实施温度控制,反馈温度检测信号等功能。
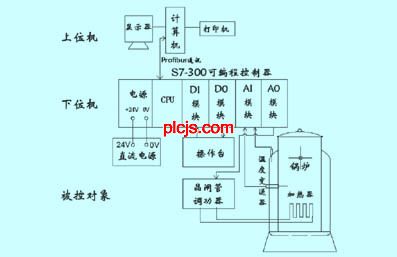
图1 锅炉温度系统结构图
系统工作原理是Fuzzy-PID控制器输出的控制量,实时调节晶闸管调功器的控制角,来控制加热器上电压的高低,达到控制锅炉温度的目的;pt100温度变送器实时检测锅炉的温度并反馈给控制器,构成温度闭环控制系统。
3 Fuzzy-PID复合控制器设计
3.1 控制策略确定
考虑到锅炉温度控制系统的特点,采用Fuzzy-PID复合控制策略,其基本思想是在大偏差(e>±5C°)时,采用Fuzzy控制算法,充分发挥Fuzzy控制器快速性好、适应能力强的的特点;在小偏差(e<±5C°)时,采用PID控制算法,充分发挥PID控制器原理简单、调节精确的特点。二者的转换用软件根据给定的的偏差(e0=±5C°)自动实现,为了尽可能避免在控制策略切换时引起的扰动,采取了当Fuzzy控制策略向PID控制策略切换时,调节器的输出将保持Fuzzy控制策略下的输出值UF,直到PID控制器输出│UPID│≤│UF│ ;当PID控制策略向Fuzzy控制策略切换时,调节器的输出将保持PID控制策略下的输出值UPID,直到Fuzzy控制器输出│UF│≥│UPID│。系统方框图如图2所示,温度给定量为TR,温度反馈量为yT,误差信号e和误差变化率信号ec,控制量为UK,被控量为TT。
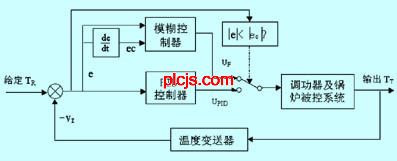
图2 锅炉温度控制系统方框图
3.2 Fuzzy控制策略
当系统温度的绝对值大于5C°时,采用模糊控制算法。模糊控制器选用双输入单输出控制方式,以温度误差e和误差变化率ec作为输入变量,以UF作为输出变量。模糊子集为E=EC=UK={NB,NM,NS,ZE,PS,PM,PB}={负大,负中,负小,零,正小,正中,正大},其论域为e=ec=uF{-3,-2,-1,0,1,2,3},或写成e:[-Xe,Xe], 变化率ec:[-Xec,Xec], uF:[-UF,UF]。隶属度函数采用三角分布函数。根据实际经验总结得到49条推理规则,采用if—then语句表达形式,得到控制变量UF的模糊控制规则表,如表1所示。
(1)if E is NB and EC is NB then UF is PB or
(2) if E is NB and EC is NM then UF is PB or
┇ or