| |
|---|---|
| (点击题目 可以在互 联 网中搜索该题 目的相关内容) 日期:2007-12-22 14:15:24 来源:PLC&FA 作者:天津工业大学 计算机与自动化学院 程 烨 王 萍 刘志国 点击: | |
|
摘 要: 热风机是以燃油或燃气的燃烧作为热量来源,调节空气的热交换量来达到控制温度的目的,介绍了一种基于Fatek PLC的热风机控制系统设计方案。主要介绍其温度控制系统部分和上位机软件部分。上位机部分可控制热风机,实时反应温度曲线,达到很好的可视化效果。 关键字: PLC/热风机/温度PID/实时曲线 1 引言 热风机是基于热能交换的加热设备。热能交换发生在通过气体或液体燃料的燃烧以加热的金属表面和与此表面发生接触的流通空气之间。燃料的燃烧是在燃烧室内进行,与空气流隔绝。空气的流动是通过一个风机设备产生的,热风机有很高的热能效率并且在之前的冷空气与热空气之间有迅速的对流。此热风机应用于工业环境中,主控制器要有很高的抗干扰能力和稳定性,选择plc作为主控器。plc 不仅具有传统控制系统的控制功能, 而且能扩展一些智能模块并构成不同的控制系统实现温度控制、闭环控制、位置控制等来适应不同的工业控制需要。plc 以高集成度、高效率、较强的抗干扰能力、组态灵活等优势在现代工业控制中得到广泛的应用。为此我们使用永宏plc 作为控制器, 它具有良好的温度控制pid算法、步进电机控制模块,通过plc 的串口通讯与pc 机连接, 构成人机界面友好、控制功能完善的温度控制系统。 2 系统构成 本系统要求严格控制热风机出风口温度,即冷空气经热交换后达到的温度值,设为t1;系统选用热电阻pt100监测入风口和出风口温度,出风口温度即为被控温度;选用调功器作为plc控制风机的连接环节,利用da模块输出4~20ma信号控制调功器来调节风机转速,这样改变进入交换室的空气量和空气的热交换时间进而改变出风口温度,形成闭环控制系统,如图1。选用热电偶测量燃烧室温度作为故障监测和风机最低转速限制,风机转速过低则空气流动缓慢,燃烧室热量积聚时间过长会减少热风机使用寿命,甚至出现危险状况。 永宏(fatek)的fbs系列plc具有良好的温度控制能力和很高的性价比,配有温度专用pid控制指令以达到精确控制,它提供了集温度采集和数据处理为一身的智能专用模块,在这个模块集成了16位a/d转换器,分辨率达到0.1℃。该模块能够自动进行线性化处理、冷端补偿,使用非常方便,仅需要将热电偶接到接线端子并进行程序控制就能对温度进行准确的采集和测量。模块可以对j、k、t、e、n、b、r、s等八种热电偶和白金电阻进行处理,可以同时输入16路温度数据进行采集。在精度为0.1℃的时候最快刷新速度为4s;在精度为1℃的时候最快刷新速度为2s。plc利用温度模块将温度采集进来以后,根据内部程序中的温度规划表格将外界目前的温度值作为控制变量,并将用户设定的温度期望值与程控变量做pid运算后得到输出值来调节可控硅调功器,以达到调节风机转速,并最终控制出风口温度。
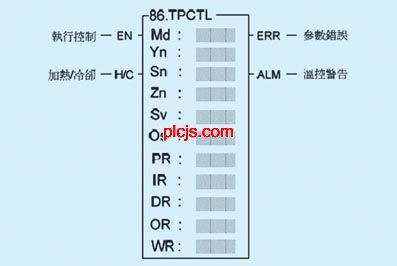
图1 系统框图 3 数字pid控制 3.1 pid控制指令 永宏plc有专门的温度数字pid控制指令,如图2所示。
图2 温度pid控制指令 该指令的数字pid运算公式: mn=[kc×en]+∑[kc×ki×ts×en]+[kc×td×(pvn-pvn-1)/ts] 其中: mn:〝n〞时的控制输出量 kc:增益(范围:1→9999) ki:积分常數(为积分时间常数ti的倒数,范围:0~9999) td:微分时间常數(范围:0~9999) pvn:〝n〞时的控制输出量 pvn-1:〝n-1〞的控制输出量 en:〝n〞时之误差=设定值(sp)-〝n〞时控制输出量(pvn) ts:pid运算的间隔时间 增益(kc)调整越大,对输出贡献越大,可得到较快且灵敏的控制反应。但增益如过大,会造成振荡现象;尽量调高增益(但以不造成振荡为原则),以增快程序反应并减少稳态误差。 积分项可用来消除设定值改变所造成之稳态误差,积分常数ki调整越大,对输出贡献越大,当有稳态误差时,可调高积分常数,以减少稳态误差。积分时间常数=0时,积分项无作用。 微分项可用来让控制反应较平顺,不会造成过度超越。微分时间常数(td)调整越大,对输出贡献越大,当有过度超越时,可调高微分时间常数,以减少超越量。 3.2 参数整定 参数整定是十分重要的,其好坏直接影响调节品质。其中pr,ir,dr是我们要整定的pid参数,上述参数设定值不在正确设定范围内时,pid指令不会执行,设定错误指示“err”。其中pr为增益设定值,ir为积分常数设定,dr微分常数。永宏plc有默认pid参数,如图4。参数整定主要是确定pr,ir,dr三个参数,这三个特性参数究竟整定到多大取决于具体被控对象的动态特性,即要根据具体被控对象来确定这三个参数。在实际工程上一般使用临界比例度法、衰减曲线法、试凑法。临界比例度法不需要求得被控对象的特性,可直接在闭合的系统中进行整定。在本系统的调试中选用了临界比例度法。一个自动控制系统,在外界干扰作用后,不能回复到稳定的平衡状态也不发散,而是产生一种等幅的振荡,这样的控制过程称为临界振荡过程。设tk 是被控变量的临界周期。被控变量处于临界振荡过程时,控制器件的比例度称为临界比例度设为pk。我们按照如下步骤整定参数: |
|
|
上一篇: 正航PLC在锅炉设备中的应用 下一篇: 施耐德Twido系列PLC和三维力控组态软件在制冷机组上的应用 |