| |
|---|---|
| (点击题目可以 在互联 网中搜索该题 目的相关内容) 日期:2006-12-21 23:08:15 来源: 作者: 点击: | |
|
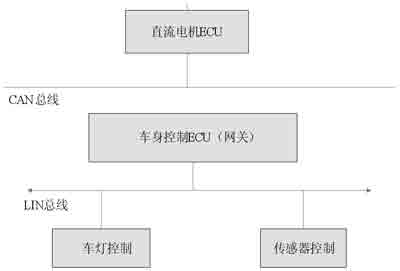
本文将介绍一种应用于寻迹小车的分布式控制系统的设计方法,该系统可对电机模块、传感器模块和灯控模块进行分布式控制。这样设计是为该系统将来从寻迹小车到真车进行移植提供方便。 此寻迹小车模型采用7.5V电池驱动,通过改变PWM占空比调速。小车可以在不完全确定的道路环境下,通过自我判断,对周围环境进行探测,并做出相应的反应(如左拐弯、右拐弯和改变速度等)。目前用在机器人上的多为价格较贵的超声波传感器和红外传感器等,本设计采用价格便宜的反射式光耦传感器来完成对周围环境的感知。此外,小车还具有良好的导航系统。 系统结构 本系统采用分布式结构,如图1所示。因为在车身控制系统中控制对象多而且分散,若采用点对点的集中控制方式,控制模块与被控对象之间就需要大量连接电缆,会导致车内布线复杂且制造和安装困难,并存在故障隐患。分布式系统结构可以根据控制对象的位置来设计控制模块,从而缩短了控制对象与控制模块之间的距离。各模块间通过LIN总线来通信,该方式仅需要一根线作为通信线。此外,分布式系统结构还可降低单板的静态电流,增加单板的稳定性。
图1 分布式车身控制系统结构图
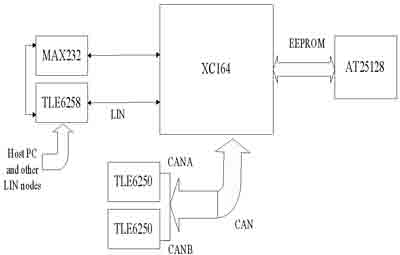
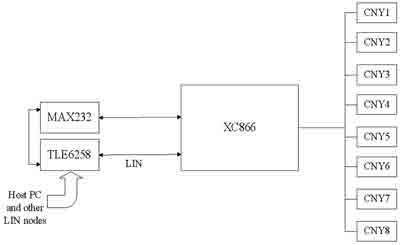
图2 主控制器模块硬件原理图 1 主控制模块的设计 根据系统功能要求和结构特点,本控制系统被分成主控模块和三个子模块(传感器模块、电机控制模块和灯控模块)。其中主控模块主要检测车身主体部分控制开关的状态,并根据这些控制开关的状态实现相应的控制策略,然后将控制命令通过CAN总线和LIN总线发送给相应的子模块,之后根据各子模块反馈的负载状态判断是否存在故障,若有故障则报警显示。同时,CAN总线接收上层CAN网络的某些信息。主控制模块的微控制器采用了可靠性高、抗干扰能力强的汽车专用芯片XC164CS,其内部集成了CAN的控制器。图2是主控制模块的硬件原理图。 2 直流电机驱动与控制模块的设计 电机控制模块中的微控制器采用的也是XC164CS,这是由于该系列微控制器中都有相应的单元可以实现对电机的控制,相当方便。本设计使用了两路电机控制小车的后轮驱动和前轮转向。对直流电机的驱动和控制采用了电机控制接口芯片TLE6209,它的内部集成了一个H型桥式电路,用来驱动电机,实现电机的四象限运行,分别对应正转、正转制动、反转和反转制动。16位微控制器XC164CS通过内部的CAPCOM模块产生一个10kHz的PWM信号给TLE6209,触发H桥电路。 3 传感器模块的设计 传感器模块中采用了微控制器XC866,主要用来采集8个传感器的值,传送给主控制板的XC164CS进行处理,然后产生相应的策略改变PWM占空比对驱动和转向电机做出相应的控制。同时,还要完成对通信模块数据的发送和接收,其硬件框图如图3所示。
图3 传感器模块硬件框图 当反光板反射式光电开关CNY70检测到给定的白色(或黑色)路线时,产生相应的电平信号,经XC866采集再通过LIN总线传送给主控制器。 系统通信 小车的各个电子控制单元之间通过LIN总线和CAN总线连接。 本系统中CAN收发器采用了TLE6250G,电机信息的传输需要高速的数据传输率(200Kb/s)以达到实时控制电机的要求。CAN的数据发送速率高达1Mb/s,可工作于只接收模式和空闲模式,具有优良的EMC特性和各种保护功能;而LIN总线因为数据传输率较低以及从确保高安全性能的角度来考虑并不合适。 本新闻共2页,当前在第1页1 2
|
|
| 上一篇: Modicon TSX Neza PLC在桥式起重机中的应用 下一篇: PLC在漂浮式水采船中的应用 |