模糊PID参数自整定技术及其在中央空调系统中的应用 | |
|---|---|
| (点击题目可以在互联网中搜索该题目的相关内容)日期:2007-1-2 21:39:51 来源: 中国自动化网 作者: 点击: | |
|
中央空调系统是一个复杂系统,其能耗占整个建筑能耗的50%以上,是耗能大户,目前的控制方式一般都采用传统的PID控制算法,其控制效果并不令人满意,浪费能源的现象严重,在系统的控制精度、稳定性和可靠性等性能方面,难以满足用户的需求。本文以某烟厂中央空调系统的工程改造为背景,讨论中央空调系统这个典型的多输入多输出、具有大滞后特性的非线性系统的控制问题。由于该系统是复杂系统,难以建立精确的数学模型,显然采用PID方式控制是不恰当的。文章提出采用基于自学习的模糊PID参数自整定技术,借助PID参数的在线模糊自整定,实时修改PID参数,确保系统在运行过程中始终处于优化状态,既满足系统技术性能指标要求又能最大限度地节约能源。以下是对某些关键技术问题的粗略讨论。 2 PID各参数对系统控制特性的影响 经典控制算法PID是传统的调节方式,也是当前中央空调系统采用的主要控制方法,要改进中央空调系统的性能,必须研究PID控制算法中各个参数对控制系统特性的影响,下面就PID调节的三个环节分别说明PID各参数对系统动、静态性能的影响。 比例环节的作用是减少偏差。比例系数 增大可以加快响应速度,减小系统稳态误差,提高控制精度。但 过大会产生较大超调,导致系统不稳定; 取得过小,可减少系统的超调量,使系统的稳定裕度增大,但会降低系统的调节精度,使系统的过渡过程时间延长。 积分环节用于消除系统的静态误差,提高系统的无差度,但会使系统响应速度变慢,使系统的超调量变大,并且可能导致系统产生振荡。加大积分系数 有利于减小系统静差,但过强的积分作用会使系统的超调量加剧,甚至引起振荡;减小积分系数 虽然有利于系统的稳定,避免系统产生振荡,减小系统的超调量,但对消除系统的静差是不利的。 微分环节能反映偏差信号的变化趋势,能在偏差信号值变得太大之前,引入一个有效的早期修正信号,有助于系统减小超调,克服振荡,使系统快速趋于稳定,提高系统的响应速度,减小调整时间,从而改善系统的动态特性。其缺点是抗干扰能力差,微分系数 的值对响应过程影响大,若增大 ,有利于加快系统响应,使超调量减小,增加稳定性,但会带来扰动敏感,抑制干扰能力减弱,若 过大则会使响应过程过分提前制动从而延长调节时间;反之,若微分系数 过小,系统调节过程的减速就会滞后,超调量增加,使系统响应速度变慢,导致系统的稳定性变差。 3 PID参数的整定原则及整定过程中存在的问题 3.1 PID参数的整定原则 在PID控制系统中,均以典型二阶系统数学模型居多,其典型响应曲线如图1所示,温度偏差 ,偏差变化率 ,现分段分析PID控制算法中各个参数的整定原则。 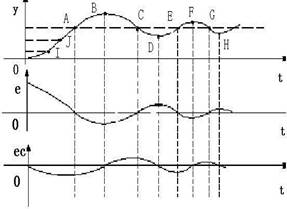 图1 典型二阶系统的响应曲线 (1) OA段(e>0,ec<0),该时间段为系统在阶跃控制信号作用下,系统由静态到动态再向稳态转变的关键阶段。由于系统惯性的影响,决定了这一段曲线只能呈倾斜方向上升。在此阶段e>0,且呈减小趋势,由于ec<0,e的绝对值呈减小趋势。为了获得较好的控制性能,在OA段应采用变增益控制。若采用固定的比例控制方式,当输出达到稳定值时,由于系统本身的惯性所致,系统不可能保持在稳态值而势必超调。为了使系统输出响应既快又不出现较大超调,可将OA段再分为三段,即OI,IJ和JA段。在OI段,e较大,为加快响应速度并防止开始时偏差e瞬间过大,可取较大的 和较小的 ,为了防止积分饱和,避免系统响应出现较大的超调,应当去掉积分作用(即 )或降低积分的作用。在IJ段,为了降低系统超调, 、 和 都不能太大,应取较小的 值, 和 值的大小要适中,以保证系统响应速度。在JA段,调量变化有减小偏差的良好发展趋势,应当减小比例系数 并增大积分系数 的值,为避免系统在设定值附近振荡,并考虑系统的抗干扰性能,应适当选取 值,通常情况下微分系数选择中等大小为好。 |
|
| 上一篇: 建筑自动化系统的工程设计与实施方法下一篇: 基于Web的建筑智能化系统集成组态软件的设计与应用 |